Testing the robot power requirements
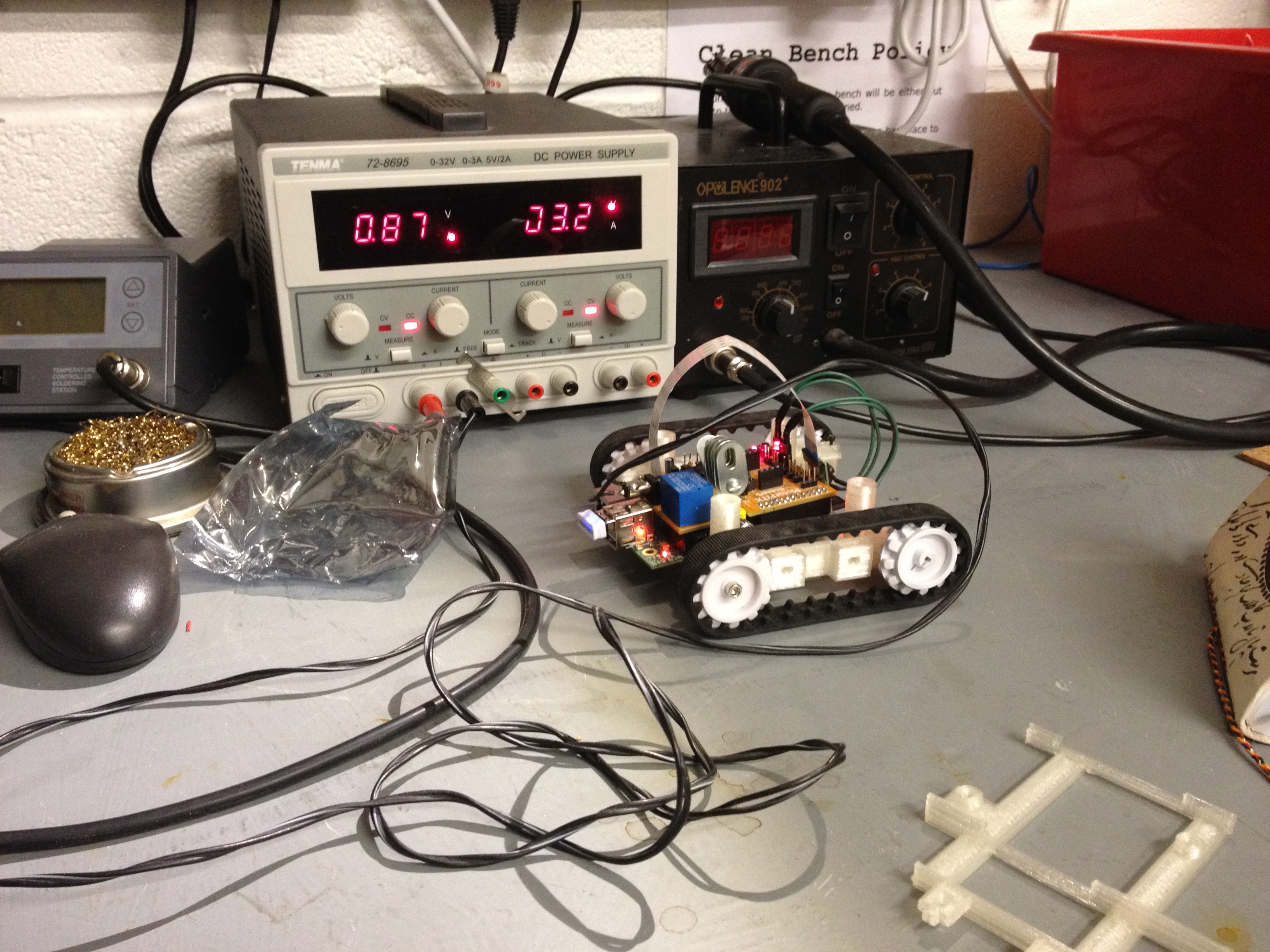
Before I pick a battery I need to know what power requirements my robot is going to have so I took it into the hackspace to test. I hooked it up to one of the power supplies then ran all the systems, so Streaming video off the Raspberry Pi over wireless whilst running the motors. I weight it down with a large motor (the big black thing) and then provided resistance, it peaks at about 1.6 amps.
In the video you can also see the new side mounted Raspberry Pi and the base of the ping-pong ball hopper.
Detail view of the side mounted Raspberry Pi and the base of the ping-pong ball hopper:
