I spent all day at hacman Tuesday and Wednesday printing and tweaking robot parts. I put it all together when I got home. This is the front, the lifter arm has holes to allow me to screw in different attachments, I’ve still not designed that part of the robot yet:
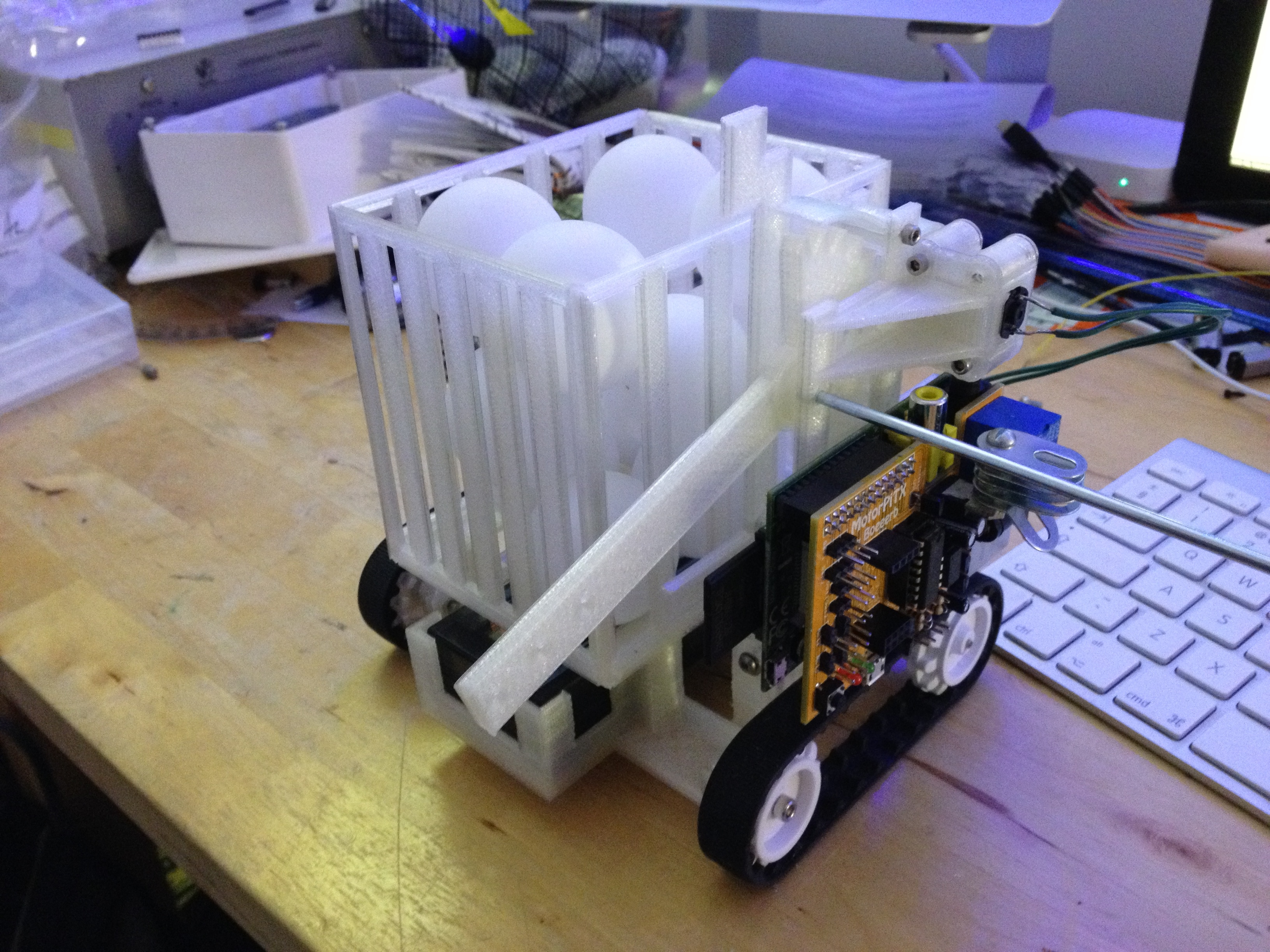
The robot, mostly assembled
Here is the back view, you can see the lifter arm gear housing (the curved structure) and the motor that drives it, also the battery (underneath the ball hopper)
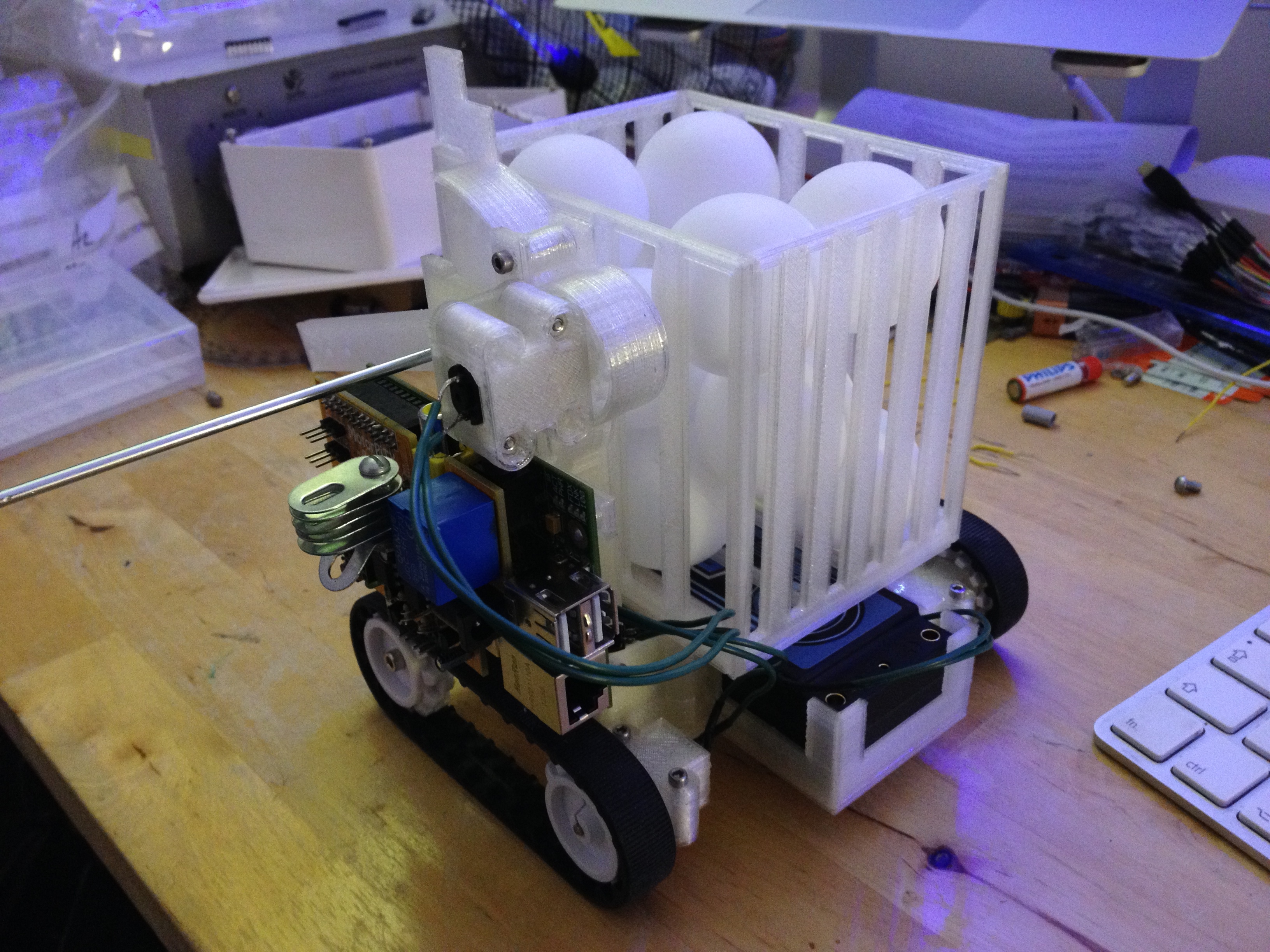
The rear of the robot with the hopper in place
The lifter arm gear system looking through where the hopper would be:
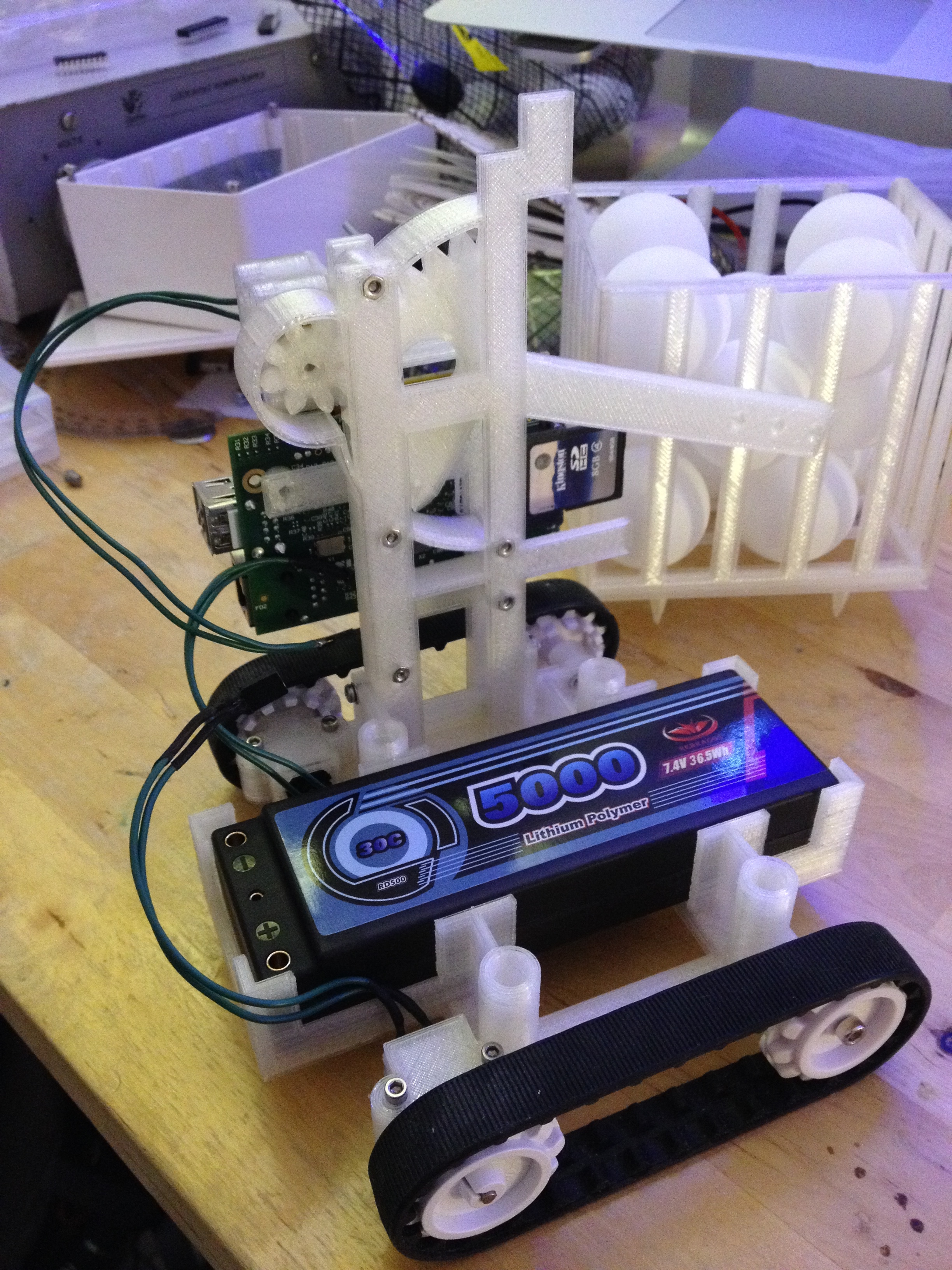
The robot without the hopper in place
I need to design an attachment for the end of the lifter arm. Here I’ve created a simple one using meccano. It’s too heavy, the bolts catch on the floor and it dumps the ping-pong balls short of the hopper. Other than that it’s perfect. You can see the camera with capped lens that I’ve just wedged into the structure temporarily:
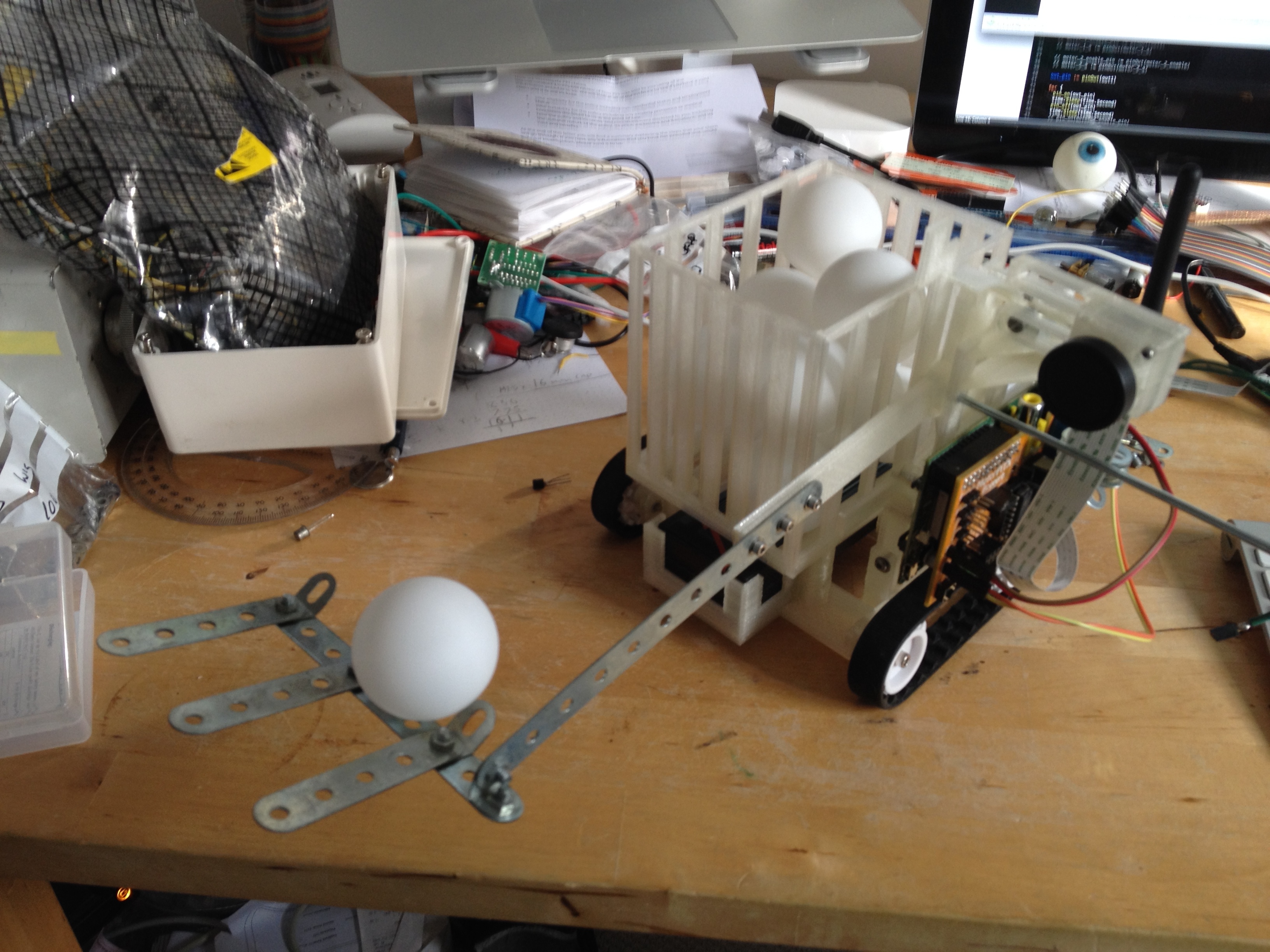
A prototype lifter arm made from Meccano
Next-up: better lifter attachment design, a couple of re-prints with tweaks and some software.