I soldered together my MotorPiTX motor controller today and fitted it to the robot:
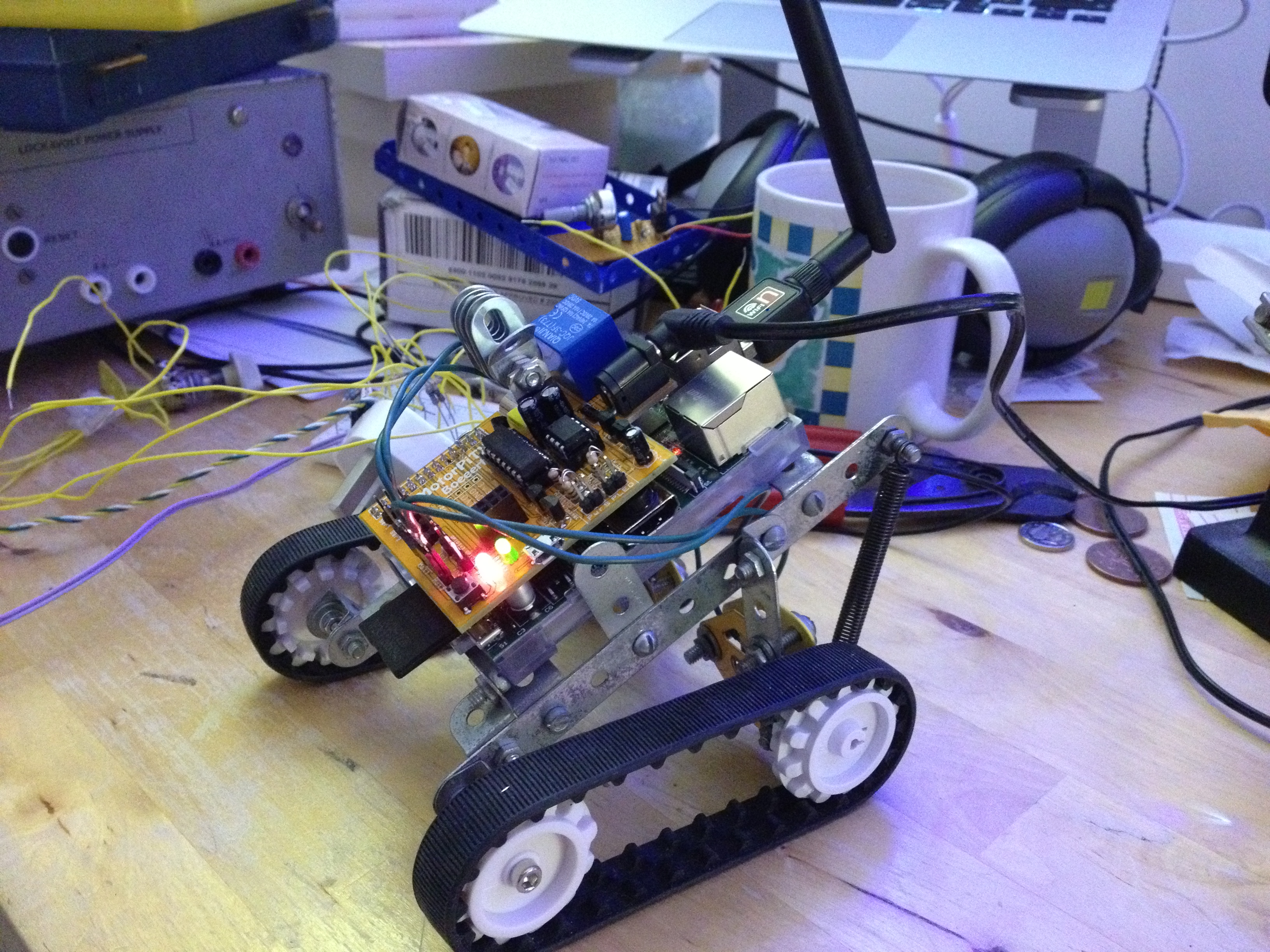
The robot with MotorPiTX board
It’s a hell of a lot neater than my original effort, and only trails one wire. It goes forwards and backwards now too. To the left of the blue relay near the top you can see my homemade heatsink attached to the voltage regulator:
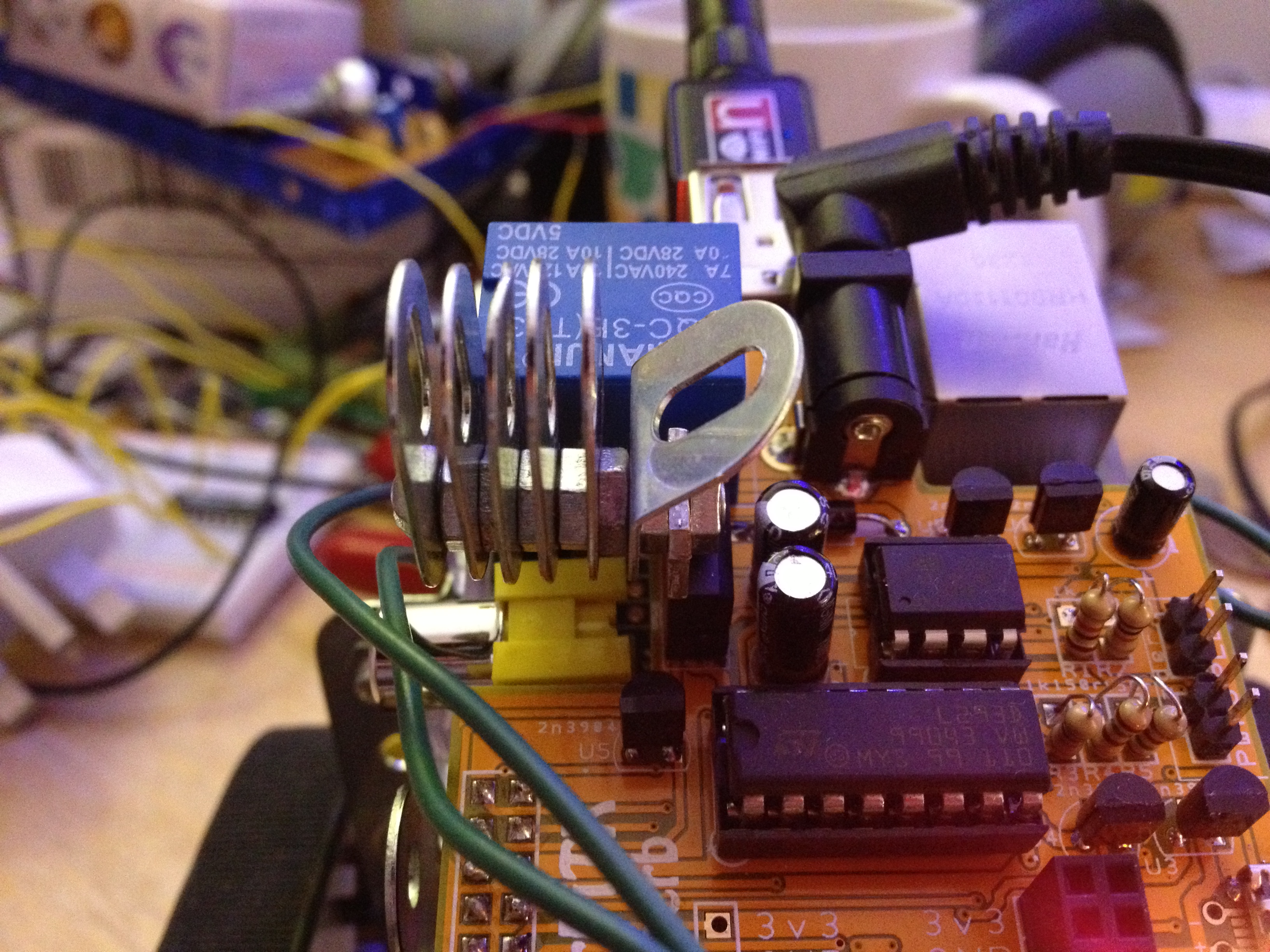
Pro-spec heatsink
The robot in action, being driven by a Go program on the Raspberry Pi:
http://www.youtube.com/watch?v=hIabB-AURT0
Next up, getting the camera working, and figuring out a better power supply/battery.